 首頁/ 最新消息
首頁/ 最新消息
仿生軟性機器人現身!!Actively Perceiving Responsive Soft Robots Enabled by Self‐Powered, Highly Extensible, Highly Sensitive Triboelectric Proximity‐ Pressure‐Sensing Skins
材料系 賴盈至 教授
Actively Perceiving and Responsive Soft Robots Enabled by Self‐Powered, Highly Extensible, and Highly Sensitive Triboelectric Proximity‐ and Pressure‐Sensing SkinsAdvanced Materials DOI: 10.1002/adma.201801114
仿生軟性機器人,具有柔軟的肌肉,更大的運動自由度,可以提供更安全、更舒適的人-機互動,以及更能適應多變環境,顯示出巨大的應用潛力。雖然如此,軟機器人類似生物肌肉,連續柔軟、可伸縮的外型,使得現今傳統的感測元件無法搭配在其身上使用,設計軟機器人的感知元件更具挑戰,不僅需要考慮元件的機械適應性,還要考慮感測元件的電力問題,而厚重、剛硬的電池又是軟機器人的問題之一;這樣的挑戰下,缺乏可用於感測皮膚、無法交互和反饋控制的軟/硬機器人,應用潛力大為受限。
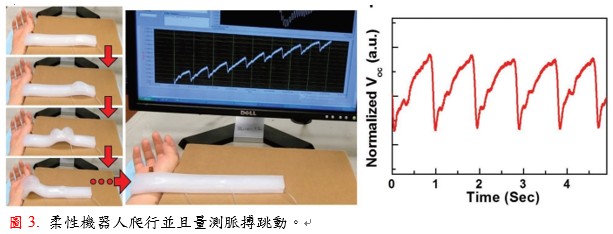
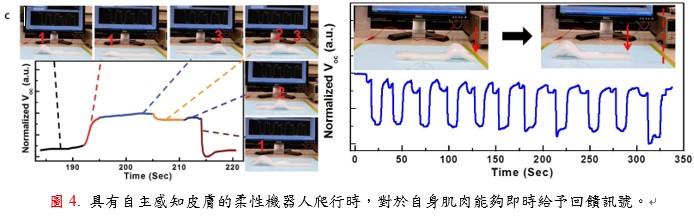
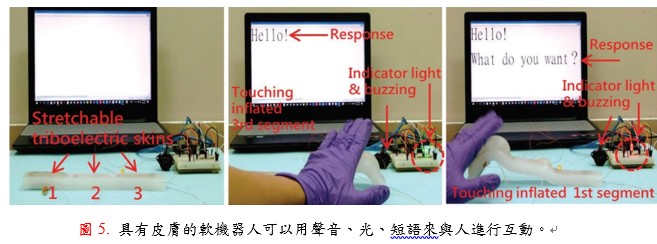
利用奈米發電機技術與奈米材料,我們實現軟性機器人的感覺皮膚。具有自主皮膚的軟性機器夾具,能夠自主感知在商品移動的每個動作(包含靠近,拿取,提升等),並且能夠察覺商品意外掉落的風險!(圖1.)具有自主皮膚的軟性機器人手指具有潛力可以幫忙檢查嬰兒尿布,使爸媽不用自己的手去摸或鼻子去聞!(圖2.)具有自主皮膚的軟性機器人還具有幫人類進行觸診的潛力,免去硬機器人的不舒適感。 (圖3.)具有自主皮膚的軟性機器人能夠對於自己移動的每個肌肉動作都有感覺(圖4.)。除了可以感知人類的碰觸外,還可以進行用聲音、光、短語來與人類進行互動! (圖5.)
目前該研究成果已經刊於國際知名期刊Advanced Materials,這項研究為人工智能、軟性機器人、和人造機器人皮膚做出了關鍵成果,也為人工智慧機器人的應用開啟了重要大門。
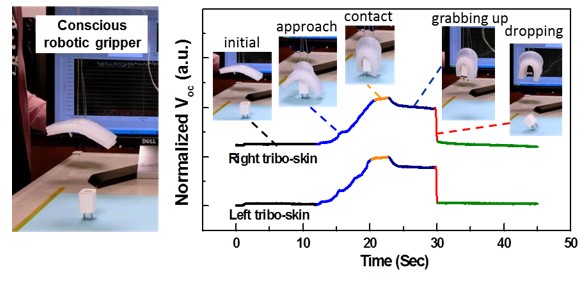 圖1. 具有感知能力的軟性機器夾具,能夠在商品移動的每個動作(包含靠近,拿取,提升等)自主感測,並且能夠感知商品意外掉落的風險!
圖1. 具有感知能力的軟性機器夾具,能夠在商品移動的每個動作(包含靠近,拿取,提升等)自主感測,並且能夠感知商品意外掉落的風險!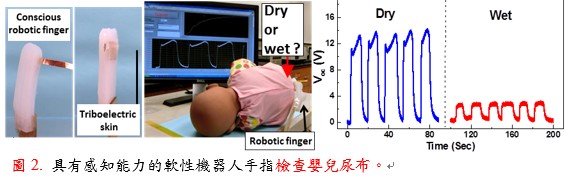
9d0ce901-2a86-4780-baae-736eb86be5aa.docx


